Oasis – Robotics & artificial intelligence for industrial risk management in hostile environments
- Porteur : CESI LINEACT
- Appel à projet : Métropole Rouen Normandie – Dispositif Plateforme
- Budget global du projet : 334 240 k€
- Budget CESI du projet : 334 240 k€
- Lancement du projet : 1er octobre 2022
- Durée du projet : 24 mois
Le projet OASIS « robOtics & Artificial intelligence for induStrial rIsk management in hoStile environments » rentre dans sa phase opérationnelle avec l’arrivée du robot SPOT dans les locaux du Campus CESI de Rouen !
OASIS est lauréat de l’appel à projet « Plateforme » 2022 de la Métropole Rouen Normandie et soutenu par la filière Normandie Energies, il vise à étendre le démonstrateur Usine du Futur du campus CESI de Rouen aux problématiques de gestion des risques industriels et son rayon d’action aux filières industrielles de l’Energie.
Pour ce faire, CESI Campus de Rouen s’est doté en février 2023 du robot quadrupède SPOT de la société Boston Dynamics. Sa morphologie, semblable à celle d’un chien, en fait un robot particulièrement agile pour évoluer dans des zones à risque, hostiles et difficiles d’accès pour l’homme, pour des missions d’inspection, de collecte, de traitement et d’analyse d’informations. Son bras articulé lui permet de réaliser des actions et d’agir sur son environnement (ouverture/fermeture d’une vanne par exemple, déplacement d’un objet, etc.).
Plusieurs actions sont prévues dans le cadre d’OASIS :
- Accompagner la transformation digitale des entreprises des filières industrielles de l’Energie pour répondre aux enjeux en gestion des risques industriels. Ceci se concrétisera par la mise en place d’un Comité de Prospective Technologique et des Usages constitué des acteurs de ces filières, d’ateliers de sensibilisation, de formations au robot SPOT et la mise en oeuvre d’une preuve de concept évaluée en situations réelles.
- Etendre l’activité de recherche actuelle de CESI LINEACT mêlant maquettes virtuelles et environnements réels pour les ateliers de fabrication, aux problématiques de gestion des risques industriels en environnements sévères.
Réalisations au 31 décembre 2024 (fin du projet) :
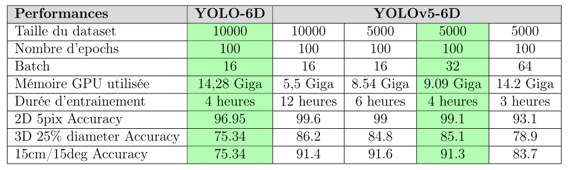
- Nous avons poursuivi nos travaux d’intégration de briques IA en reconnaissance et estimation de pose 6D pour le robot SPOT (prolongement des travaux du projet COLIBRY). A ce titre nous avons réalisé une nouvelle veille scientifique sur les approches récentes de la littérature et identifié YOLOV5-6D.
- Nous avons opéré une migration des travaux existants vers cette nouvelle approche et comparé sur nos jeux de données d’objets industriels les performances de YOLO-6D et YOLOV5-6D (cf. Tableau 1)
- Nous avons développé le simulateur du bras robotique du SPOT. Ce dernier n’apparait pas dans le logiciel ROS que nous utilisons pour programmer les tâches robotiques et en particulier dans l’interface de simulation RViz. Il s’agit là d’un point bloquant puisque nous ne pouvons simuler qu’une partie du comportement du robot : ses déplacements dans un environnement. Ce qui relève des actions liées à son bras ne seront pas simulées. Afin de pallier ce problème, nous avons modélisé le bras articulé de SPOT suivant un modèle URDF (Unified Robot Description Format) en définissant :
o Chaque partie du bras (Links) comme un lien avec des dimensions, des matériaux et des représentations visuelles spécifiques pour simuler la géométrie réelle du brasLes articulations sont également définies avec des limites pour chacune d’elles de sortent à ce que bras articulé virtuel simule correctement le bras physique de SPOT.
o Les propriétés inertielles et physiques des liens sont finalement définies, telles que la masse ou le centre de gravité, ce qui permet d’accroitre le la précision des simulations physiques.
- Ce modèle URDF une fois défini, est ensuite intégré dans le logiciel ROS, sous forme d’un package, ce qui revêt plusieurs avantages :
o Un contrôle conjoint en temps réel : en utilisant les packages ROS control et joint_state_publisher, les articulations du bras peuvent être manipulées en temps réel. Les commandes envoyées à SPOT sont traduites en mouvements d’articulation qui se reflètent à la fois dans le modèle URDF et sur le robot physique.
o Éditions d’état : Le noeud joint_state_publisher permet de publier l’état de chaque articulation en temps réel. Ceci est essentiel pour une visualisation précise dans RViz, où les mouvements des articulations doivent correspondre aux mouvements physiques des bras de SPOT.
La visualisation de SPOT et de son bras robotique se fait dans RViz (cf. Figure 1). Ceci permet aux utilisateurs de voir une représentation virtuelle du bras et du robot dans leur espace de travail, chaque lien et chaque articulation se déplaçant conformément aux commandes en temps réel. À l’aide des plugins MoveIt et rviz_motion_planning de ROS, les utilisateurs peuvent planifier et exécuter des trajectoires et visualiser les mouvements des bras dans RViz. Le retour visuel dans RViz permet de détecter facilement les écarts entre le mouvement prévu et le mouvement réel, ce qui permet des ajustements précis.
Plusieurs tests ont été réalisés en déplaçant le bras du robot SPOT selon différents schémas. La validation du mouvement en temps réel a été obtenue en comparant les mouvements physiques du bras avec la visualisation RViz.

- Nous avons finalement travaillé à la production de documentations techniques sur les développements effectués de sorte à capitaliser sur les travaux réalisés.
Recrutements sur cette période :
- Tanny DAMET, stagiaire de Master 2 (6 mois), pour appuyer les travaux menés par l’ingénieur de recherche Ilamparidi SANKAR, notamment sur le volet intégration de l’IA pour le robot SPOT pour des missions de reconnaissance et de détection d’objets en 6D
- Alexandre DELATOUR, stagiaire CESI (5 semaines) dans le cadre du stage d’initiation à la recherche proposé aux étudiants du Programme Grande Ecole. Ce stage a porté sur la création d’une documentation technique de type « revue de code » sur les briques logicielles développées par Ilamparidi SANKAR et Tanny DAMET, avec l’objectif de capitaliser sur les travaux réalisés.