Scopes- Semantique Collaborative pour une Perception Evidentielle de Situation


- Partenaires : CESI LINEACT, LITIS, IRSEEM
- Appel à projet : ANR ASTRID Robotique 2021
- Budget CESI du projet (financement) : 210 k€ (105 k€)
- Budget global (financement) : 547 k€ (300 k€)
- Lancement du projet : 1er janvier 2022
- Durée du projet : 39 mois
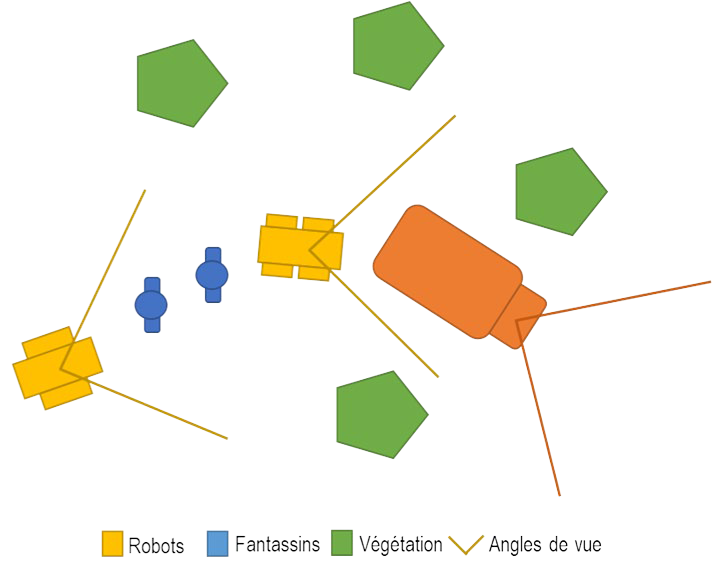
Les domaines de l’industrie 5.0 et de la défense reposent de plus en plus sur des systèmes de systèmes où des agents robotisés doivent s’adapter aux humains avec lesquels des interactions s’opèrent. L’utilisation de flottes hétérogènes d’agents disposant de dispositifs de perception est une aubaine qui permet, après fusion des informations individuelles, de proposer des solutions aux problématiques d’optimisation d’exploitation de la flotte, de sécurisation du convoi, d’amélioration de la sécurité et de la sureté au service des opérateurs humains, ainsi que de l’accroissement de la flexibilité suite à la reconfiguration de situations ou de l’environnement.
La mutualisation de l’information permet de produire une vue globale de la situation issue des perceptions individuelles de chaque agent robotique ou non. Chaque module individuel de perception produit une interprétation de scène qui est par nature entachée d’incertitude. Les conséquences d’un déploiement de la flotte en environnements complexes ou hostiles doivent également être considérées. Le lien de communication requis pour l’échange d’information est sujet à une bande passante qui peut être très limitée voire inexistante quand le lien est rompu même temporairement. Les positions des points de vue nécessaires à la création de la vue de situation sont également tributaires de la qualité de l’information des sources de localisation lorsqu’elles sont disponibles.
Le projet SCOPES propose de développer une solution de production de vue de situation augmentée par l’incertitude comme source d’information décisionnelle. Les contributions du projet seront :
- Un formalisme de représentation de la vue de situation, intégrant les différentes sources d’incertitudes, permettant une interprétation par l’humain,
- Une méthode robuste de localisation basée sur le paradigme des graphes et l’information sémantique fournie par chaque agent,
- Une spécification fonctionnelle et les jeux de données associés pour évaluation objective et quantitative des situations de perceptions collaboratives grâce à l’exploitation des plateformes technologiques remarquables des partenaires du projet.
Le projet SCOPES aboutira à des productions de niveau TRL 4. L’intérêt du projet pour les acteurs économiques a été reconnu par la labellisation du projet par NAE (Normandie AeroEspace).
Réalisations au 31 décembre 2024 :
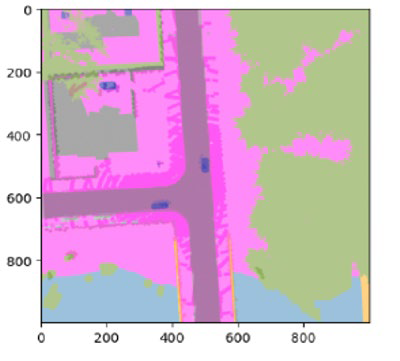
- Formalisation et représentation d’une grille sémantique évidentielle.
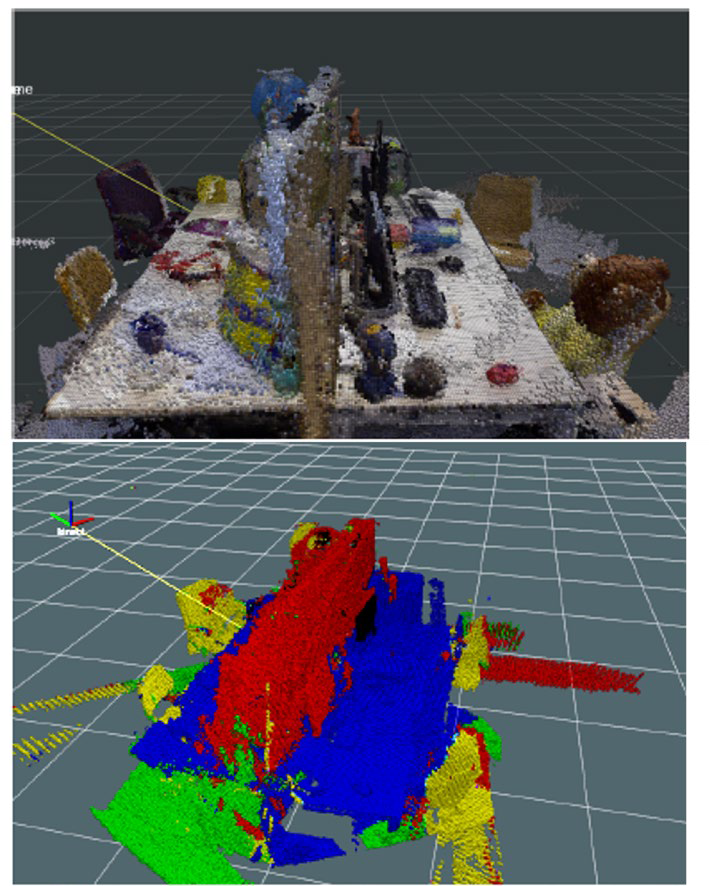
- Localisations et cartographies robustes et légères par graphes en environnements complexes par cohérence spatio-temporelle.
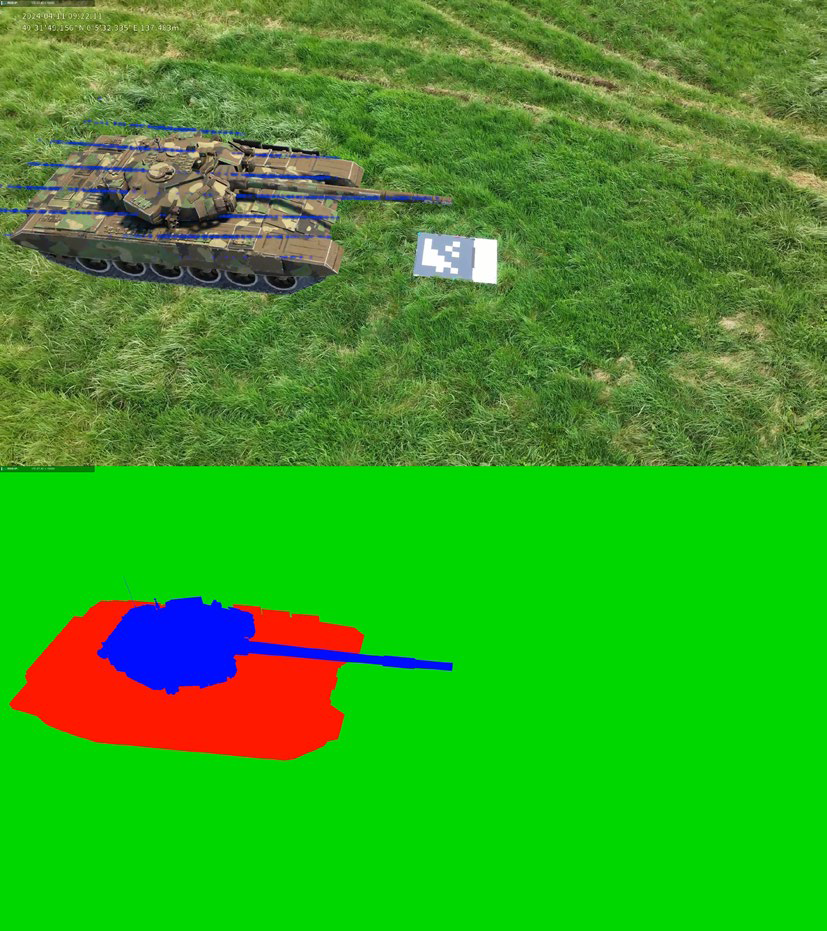
- Méthodologie de production de données par réalité étendue.
- Vue de situation avec prise en compte des sources d’incertitudes (IHM).
- Représentation, restitution et visualisation de l’incertitude dans une carte pour la prise de décision par l’humain.
- Production logicielle :
o Code de génération des données simulées (CARLA / OpenScenario),
o Code d’estimation des grilles d’occupation sémantique évidentielles,
o Code de l’approche de SLAM RGBD avec consistance spatiale et temporelle sur Github,
o Logiciel d’augmentation multimodale de données RGBD,
o Logiciel de visualisation de grille d’occupation sémantique évidentielles dans un jumeau numérique.
La réunion de clôture du projet a eu lieu le 13 mars dernier sur le campus CESI de Rouen en présence des partenaires et des financeurs et le projet s’est terminé officiellement le 31 mars 2025